Luke's Hand
Group 6: Fall 2009

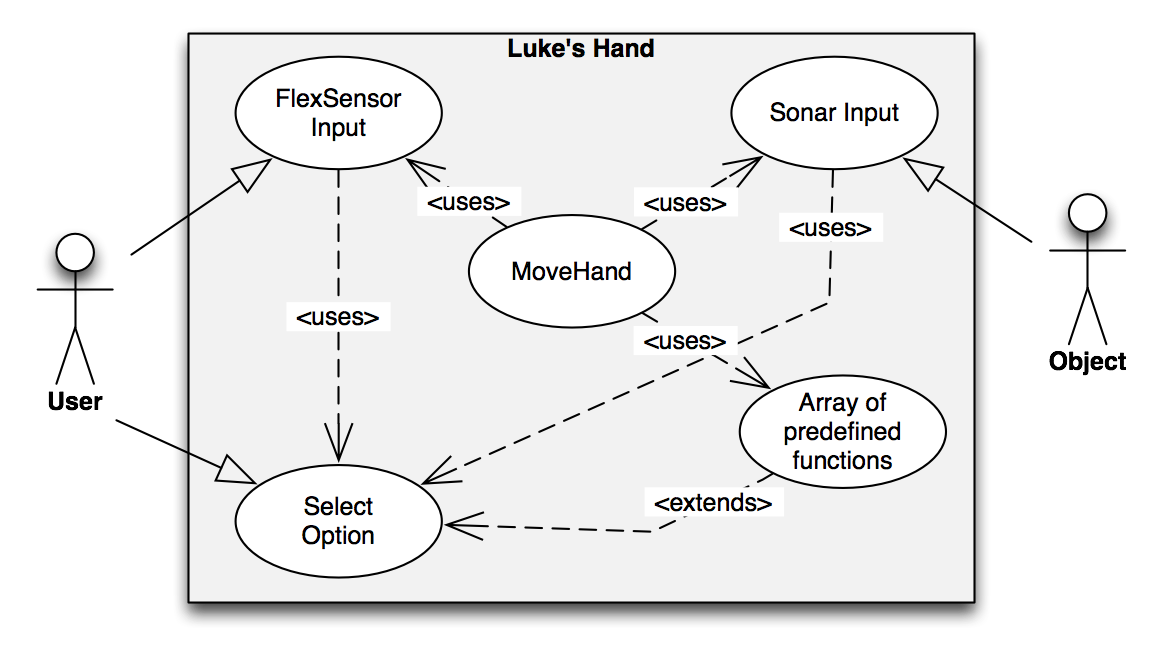
Luke's Robotic Hand is an attemp to provide a fully functional, and yet inexpensive limb for amputees. The project intended to develop a hand that could easily mimic the movement of the human hand and be controlled through different interfaces. A glove interface, wireless device, swtiched-based, and Computer interface were considered, but due to different reasons, only the glove and switched-based interfaces were succesfully implemented.
The hand makes use of different force and distance sensors to move in a smooth manner, while being able to detect an object that is with in it's grasp range, and thus grab the object when instructed.