- To advance our society, I believe that computing machines, such as robots, should be able to "think" and "learn" effectively. To this end, my research focuses on 1) Integrated Circuit and System Design, 2) Reconfigurable Computing, and 3) AI and Machine Learning.
- 1) AI-Driven Robotics: Novel graph-theoretic and manifold learning algorithms for optimal robotic control.
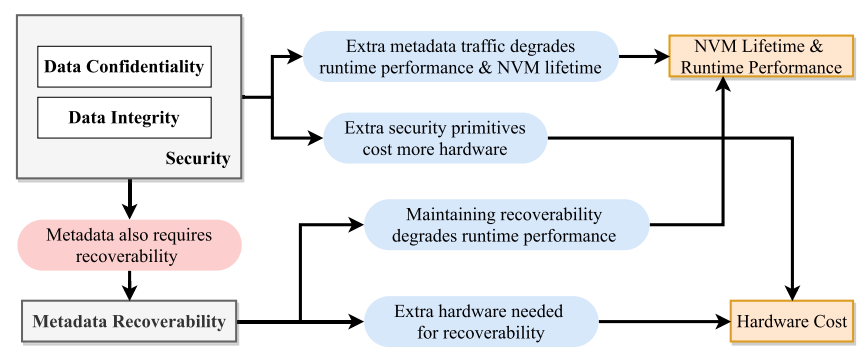
- 2) FPGA-Based Computing Security: Advanced mechanisms for computing security, authentication, recoverability of modern NVM.
- 3) Memory Optimization Algorithms in HLS: Classical memory optimization methodologies and algorithms in FPGA high-level synthesis.
About Me
Email: mingjie.lin@ucf.edu
Research
Dynamically Avoiding Amorphous Obstacles with Topological Manifold Learning and Deep Autoencoding
To achieve conflict-free human-machine collaborations, robotic agents need to skillfully avoid continuously moving obstacles while achieving collective objectives. Sometimes, these obstacles can even change their 3D shapes and forms simultaneously, hence being “amorphous”. To this end, this paper formulates the problem of Dynamic Amorphous Obstacle Avoidance (DAO-A), where a robotic arm can dexterously avoid dynamically generated obstacles that constantly change their trajectories and their 3D forms.
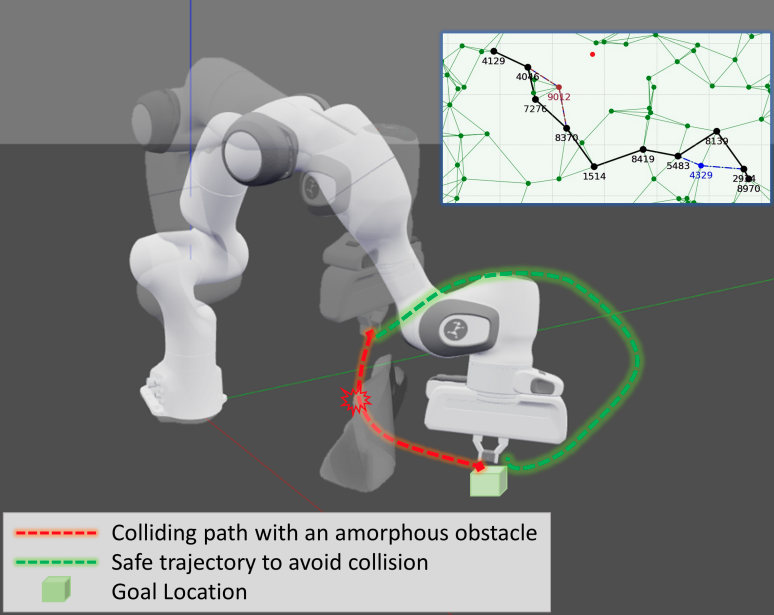
A 7-DoF robotic manipulator needs to reach a target while avoiding a dynamically moving and changing obstacle. The motion control of this manipulator is computed by dynamically traversing a 2D graph generated by manifold learning. The forward and backward mappings between high-dimensional robotic pose space and low-dimensional manifold space are computed by an autoencoder implemented with two independent deep neural networks (DNNs).
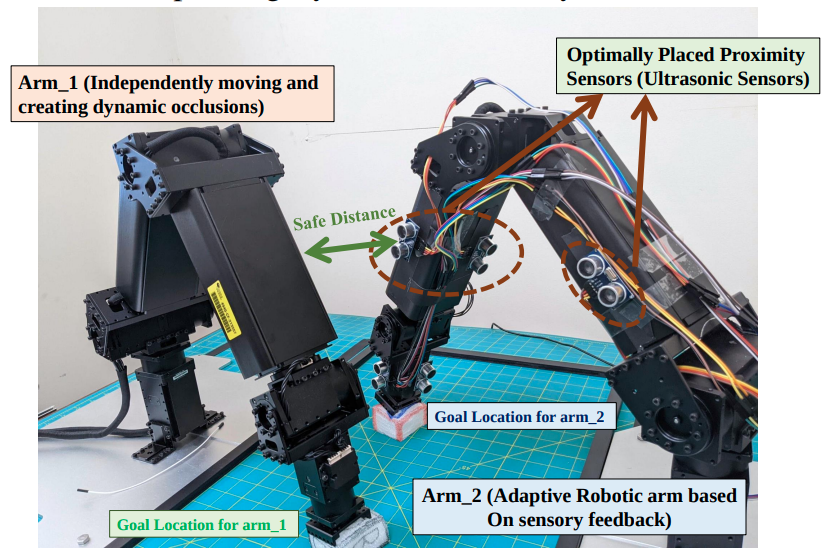
Hardware Platform with Sensor Attachment. The reactive path planning from sensory feedbacks to avoid probable collisions with arm 1. Methodologies: 1) topological manifold learning and 2) DNN-based deep learning for dimension reduction. Practically, our methodology consists of three key steps. First, we solve a obstacle avoidance problem with an arbitrary but fixed obstacle location and an arbitrary objective. This solution will serve as the basic building block of our overall strategy. Second, we develop a scheme to optimally place vicinity sensors on the robotic surface area, which minimizes the total number of vicinity sensors and maximizes the overall detection coverage. Finally, we construct a novel scheme to dynamically determine the most critical collision point when a given robotic arm interacts with a 3D obstacle subject that not only moves but also potentially changes its form on the fly.
Reactive Whole-Body Obstacle Avoidance for Collision-Free Human-Robot Interaction with Topological Manifold Learning
In this paper, we present a novel methodology of reactive whole-body obstacle avoidance methodology that safeguards the human who enters the robot’s workspace through achieving conflict-free human-robot interactions even in a dynamically constrained environment. Unlike existing Jacobian-type or geometric approaches, our proposed methodology leverages both topological manifold learning and latest deep learning advances, therefore can not only be readily generalized into other unseen problem settings, but also achieve high computing efficiency with concrete theoretical basis. Furthermore, in sharp contrast to the industrial cobot setting, our methodology allows a robotic arm to proactively avoid obstacles of arbitrary 3D shapes without direct contacting.
Non-Parametric Stochastic Policy Gradient with Strategic Retreat for Non-Stationary Environment
In this paper, we propose a systematic methodology to dynamically learn a sequence of optimal control policies non-parametrically, while autonomously adapting with the constantly changing environment dynamics. Specifically, our non-parametric kernel-based methodology embeds a policy distribution as the features in a non-decreasing Euclidean space, therefore allowing its search space to be defined as a very high (possible infinite) dimensional RKHS (Reproducing Kernel Hilbert Space). Moreover, by leveraging the similarity metric computed in RKHS, we augmented our non-parametric learning with the technique of AdaptiveH— adaptively selecting a time-frame window of finishing the optimal part of whole action-sequence sampled on some preceding observed state.
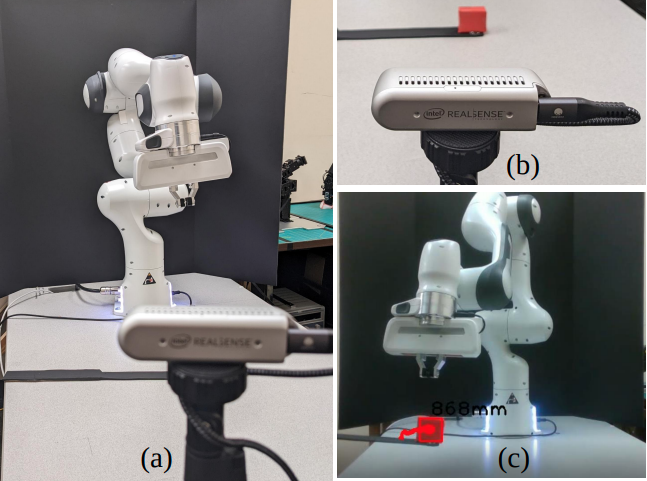
(a) Hardware setup with a 7 DOFs Franka Emika Panda Arm (b) Intel RealSense
Depth Sensing Camera as tracking sensor to track the position of the moving
target position(red colored box), (c) Position tracking through Depth Sensing
Camera.
Selected Publications
Zou Yu, Kazi Abu Zubair, Mazen Alwadi, Rakin Muhammad Shadab, Sanjay Gandham, Amro Awad and Mingjie Lin.
ARES: Persistently Secure Non-Volatile Memory with Processor-Transparent and Hardware-Friendly Integrity Verification And Metadata Recovery,
Transactions on Embedded Computing Systems, 10.13140 / RG. 2.2.27012.45447, 2021.
[pdf]
Zou Yu, Amro Awad, and Mingjie Lin.
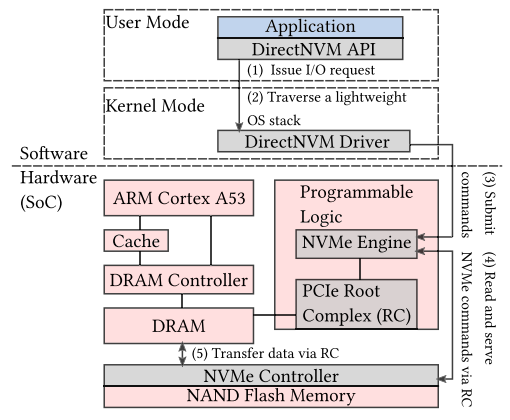
DirectNVM: Hardware-Accelerated NVMe SSDs for High-Performance Embedded Computing,
ACM Transactions on Embedded Computing Systems, Page(s): 65-78, Volume: 10, Issue: 5,
2021.
[pdf]
Apan Dastider, Sayyed Jaffar Ali Raza, and Mingjie Lin.
Learning Adaptive Control in Dynamic Environments using Reproducing Kernel Priors with Bayesian Policy gradients,
In Proceedings of the 37th Annual ACM Symposium on Applied Computing. Association for Computing Machinery, New York, NY, USA. 2022..
Contact
Mingjie Lin
Electrical and Computer Engineering
University of Central Florida (UCF)
Orland, FL 32816
Email: mingjie.lin@ucf.edu