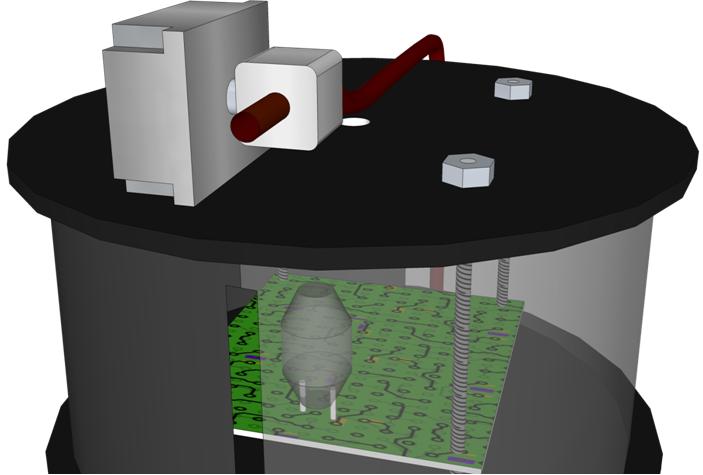
The chosen sensor for fire detection is the Hamamatsu UVTron Flame Sensor with C10807 driving board, an ultraviolet detector that is tuned to the specific emissions from flames. The C10807 driving board converts the output of the UVTron into a series of pulses that has a frequency dependant on the amount of incoming ultraviolet radiation. The UVTron was chosen due to its 16 foot fire detection range, its wide 120° x 120° field of view that can simultaneously be easily limited, and the low computational requirements of its implementation.
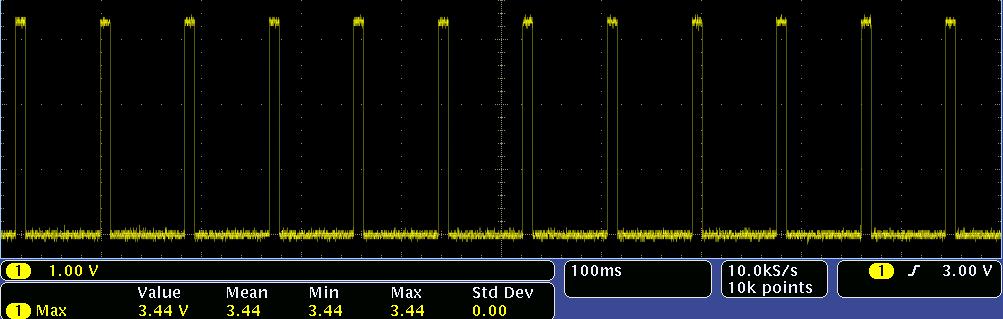
The UVTRON's C3704 board outputs a 10 ms width pulse output that corresponds to detected sources of ultraviolet radiation. The specifications for the sensor indicate that there is a background pulse allowance that must be accounted for in order to prevent false positives. Thus the flame sensor outputs a frequency varying signal whereby higher frequencies denote higher sources of ultraviolet radiation and lower frequencies indicate adjacent sources or simply background radiation.
The integration of the UVTRON and the MSP430 then relies on a method for counting the pulses emitted by the C10807 board and comparing the measured count to a predefined threshold. This is most readily accomplished by polling a GPIO pin on MSP430 at a higher sampling frequency than the on period of the square pulses. From the experiments, it was determined that small flame sources roughly 1 meter from the UVTRON will result in signals of 10 pulses per second from the C10807 with an on time of 10 ms, as shown below.
By sampling the state of the input pin every 1 ms, pulses can be discerned, counted, and and used to determine the frequency of the C10807 output. By adjusting the shroud slit opening and measuring the frequency for a flame output, the threshold frequency can be determined for optimum aiming.
The design of the rover and its intended use require that the flame detector's field of view be swept horizontally through the environment to accurately guide the extinguishing hose. This is accomplished through the use of programmed loops that sweep through a range of horizontal values for the x-plane servo motor that occur while monitoring the frequency of the C10807 output signal. These sweeps will call functions in the MSP430 written to control the stepper motors as outlined previously. The functions deterministically manipulate the horizontal and vertical values such that a return to a predefined location is possible, ensuring that the sweeping sensor's location will be known.