Senior Design 1 (EEL 4914)
Follow Link below to SD1 Document
Senior Design 1 DocumentInitial Project Description
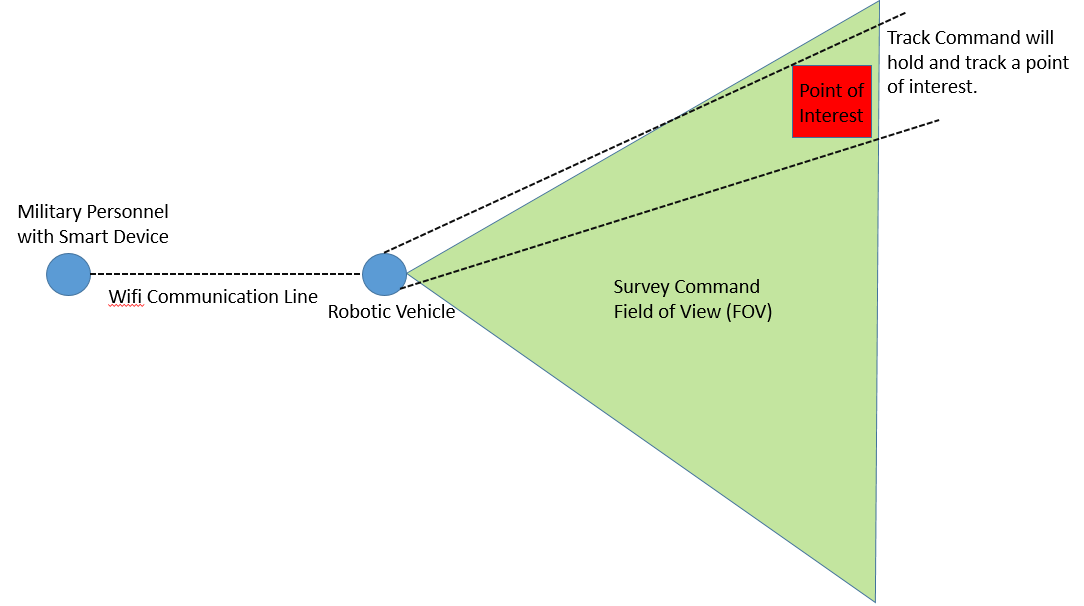
Our project seeks to improve the solution of robotic ground surveillance by developing an autonomous robotic vehicle using computer vision and ultrasonic sensors that will aid the military personnel in finding a point of interest such as an injured individual, bomb, enemy combatant, vehicle, and much more. The robotic vehicle will have three primary functions to demonstrate how our robot could achieve this. The functions being survey for a point of interest (POI), track a POI, or find a POI. Surveying a POI means that the robot will move to the target location and use its camera to gain a visual of an entire area. This is a basic reconnaissance mode that is useful gaining information on an area and for finding a potential target. The track command will be used to follow a desired target. A color or special target will be designated as the tracked object, and the robot will be programmed to recognize the designation and once it is locked, it will follow the target and keep a visual of it in the camera. The find command will cause the robot to find a target with the designation. Along with the survey function, the robot can move to a desired location and search an area for a target, then with the track function the robot can lock onto that target and follow it until the command is canceled.
All of the mentioned functions would aid in ground reconnaissance by making it so that the robot can autonomously perform the reconnaissance without having a dedicated operator constantly controlling the robot. The controlling device would be simple to use, so that anyone could operate the robot, and the commands would allow for the user to simply give a command and the robot will automatically perform the task while freeing the operator to do another task while the robot performs its mission. These three functions mentioned will be activated from a voice command given into a smart phone or device by the military personnel.
Our motivation for choosing this project is that we would like to incorporate a project the includes equal elements of Computer Engineering and Electrical Engineering so that we can use the full spectrum of our degrees equally since we have two members from each discipline. We feel that his project offers unique challenges by designing smart algorithms that allow the user to interact with the vehicle in a much more unique fashion. Unlike some other robotics projects, our design is aimed at being a functional real world device that can be a useful tool for military or police.
The robotic vehicle will be Wi-Fi enabled to allow for communication of the voice commands from the user to the vehicle for which mode to enter. This will also be used for the capability to provide camera feed back to the user. This will provide the user with the ability to see what is being surveyed, tracked, and/or found. The camera mentioned will also be used for the computer vision section of our project allowing the robot to distinguish between what is a POI and what is not. The last addition to the base robotic vehicle is ultrasonic sensors that will be positioned around the vehicle to allow it to run autonomously without collision.
Initial Project Diagram